revenir à la page d’où je viens passer à l’exploration de Mars par Curiosity voir les films de MSL par Curiosity
Mars Science Laboratory
Mars Science Laboratory (MSL, en français « Laboratoire de science martienne ») est une mission d'exploration de la planète Mars à l'aide d'un astromobile (rover = Curiosity) développé par le centre JPL (Jet Propulsion Laboratory qui est un centre de recherche spatiale de la NASA) associé à l'agence spatiale américaine de la NASA.
{kind=link}
 La sonde spatiale est lancée le 26 novembre 2011 par un lanceur Atlas V. Le site d'atterrissage, sur lequel la sonde spatiale s'est posée le 6 août 2012, se situe dans le cratère Gale. Au cours de sa mission actuelle (à l’heure où sont écrites ces lignes, soit novembre 2019), l'astromobile, nommé Curiosity, recherche si un environnement favorable à l'apparition de la vie a existé, analyser la composition minéralogique, étudier la géologie de la zone explorée et collecter des données sur la météorologie et les radiations qui atteignent le sol de la planète. La durée de la mission est fixée initialement à une année martienne soit environ 669 sols (jours solaires martiens) ou 687 jours (solaires) terrestres.
La sonde spatiale est lancée le 26 novembre 2011 par un lanceur Atlas V. Le site d'atterrissage, sur lequel la sonde spatiale s'est posée le 6 août 2012, se situe dans le cratère Gale. Au cours de sa mission actuelle (à l’heure où sont écrites ces lignes, soit novembre 2019), l'astromobile, nommé Curiosity, recherche si un environnement favorable à l'apparition de la vie a existé, analyser la composition minéralogique, étudier la géologie de la zone explorée et collecter des données sur la météorologie et les radiations qui atteignent le sol de la planète. La durée de la mission est fixée initialement à une année martienne soit environ 669 sols (jours solaires martiens) ou 687 jours (solaires) terrestres.
{kind=link}
Le rover Curiosity est cinq fois plus lourd que ses prédécesseurs, les Mars Exploration Rovers (MER), ce qui lui permet d'emporter 75 kg de matériel scientifique, dont deux mini-
Pour répondre aux besoins accrus d'énergie et s'affranchir des contraintes de l'hiver martien et des périodes nocturnes, le rover utilise un générateur thermoélectrique à radioisotope qui remplace les panneaux solaires mis en œuvre par les précédentes missions. Enfin, il bénéficie de logiciels évolués pour naviguer sur le sol martien et exécuter les tâches complexes. Le rover est conçu pour parcourir 20 km et peut gravir des pentes de 45°.
La sonde spatiale au départ de la Terre a une masse de 3,9 tonnes et comprend un étage de croisière chargé d'amener la sonde jusqu'à proximité de la planète Mars, un véhicule de rentrée qui assure la traversée de l'atmosphère martienne à grande vitesse et un étage de descente chargé de la dernière phase aboutissant à l'atterrissage. Pour parvenir à poser le rover de 899 kg sur le sol martien avec la précision demandée par les objectifs scientifiques, la technique d'atterrissage utilisée par ses prédécesseurs a été profondément modifiée : la phase de rentrée atmosphérique est en partie pilotée pour restreindre la zone d'atterrissage à une ellipse longue de 20 km et large de 7 km. Le rover est déposé en douceur sur le sol par un étage de descente fonctionnant à la manière d'un hélicoptère-
MSL constitue la mission interplanétaire de la NASA la plus ambitieuse jusqu'à ce jour. La complexité de la sonde et du rover ainsi que la nécessité de mettre au point de nouvelles technologies spatiales ont entraîné des modifications importantes du concept de départ durant le développement : le coût total du projet était évalué en 2011 à 2,5 milliards de dollars.
Tu suis, ma cousine, tout va bien ?
 Les atterrisseurs et les rovers
Les atterrisseurs et les rovers
Les atterrisseurs (fixes) et les rovers mobiles, capables de circuler sur le sol, ont jusqu'à présent joué un rôle plus modeste dans l'exploration de Mars : ils sont essentiellement chargés de valider sur le terrain les déductions tirées des observations des orbiteurs. MSL est le dernier représentant de la série d'engins américains qui sont parvenus à se poser sur le sol martien : il prend la suite des deux atterrisseurs Viking statiques qui ont tenté d'identifier des traces du vivant (1975), de l'atterrisseur Pathfinder (1996) qui pour la première fois a mis en œuvre le rover de taille modeste (10,6 kg) baptisé Sojourner, des rovers MER (2003) de 174 kg qui sont les premiers à avoir effectué un véritable travail de géologue sur le terrain avec toutefois une palette d'instruments limitée par les contraintes de poids et enfin de l'atterrisseur statique Phoenix (2008) chargé d'étudier la région du pôle Nord martien.
{kind=link}
Poser un engin sur le sol martien est un exercice difficile, comme l'ont démontré les échecs de trois engins soviétiques et plus récemment de Mars Polar Lander (1998) et Beagle 2 (2003). Mars a en effet une gravité forte si on la compare à la Lune (un peu plus du tiers de celle de la Terre soit plus du double de la Lune) ; par ailleurs les sondes spatiales, pour parvenir jusqu'à la planète, doivent arriver à grande vitesse (environ 5 à 6 km/s). Un recours important au freinage à l'aide de moteurs-
Les objectifs de la mission
La mission Mars Science Laboratory poursuit quatre objectifs principaux :
- déterminer si des conditions propices à la vie ont pu exister sur Mars
- caractériser le climat de Mars
- préciser la géologie de Mars
- préparer l'exploration humaine de la planète rouge.
La sélection du site d'atterrissage
Le choix du site d'atterrissage de Mars Science Laboratory est crucial pour le succès de la mission. Le site doit présenter un environnement géologique ou un ensemble d'environnements propices à la vie. Il doit permettre de réaliser la plus grande variété d'expériences afin de maximiser le nombre d'axes de recherche pouvant être explorés. Dans l'idéal, la région accessible depuis le site d'atterrissage doit présenter des spectres indiquant la présence simultanée de plusieurs minéraux hydratés, par exemple des argiles avec des sulfates hydratés. L'hématite, d'autres oxydes de fer, les sulfates, les silicates, ainsi peut-
Les sites susceptibles d'avoir préservé d'éventuelles traces de vie passée présentent une topographie marquée, offrant ainsi une grande variété d'affleurements et de roches. Les concepteurs de la mission Mars Science Laboratory ont donc dû élaborer un véhicule capable d'atteindre et d'explorer de tels sites en toute sécurité. Les contraintes techniques de la mission (masse de la sonde, scénario d'atterrissage) imposent de choisir un site d'atterrissage situé à moins de 45° de l'équateur de Mars et à moins de 1.000 m d'altitude au-
L'équipement scientifique
Le rover embarque 10 instruments scientifiques qui doivent lui permettre de détecter d'éventuelles traces d'eau, analyser précisément les roches, d'étudier les minéraux présents à la surface de Mars, mesurer la chiralité des molécules détectées, et effectuer des photographies à haute résolution. Certains de ces instruments sont développés avec la participation de laboratoires étrangers. Ces équipements se rangent dans quatre catégories :
{kind=link}
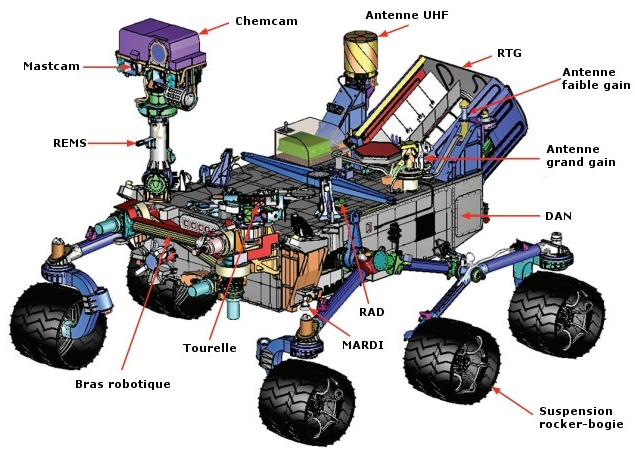
- deux instruments permettant de faire des analyses à distance et situés dans le mât du rover : la caméra MASTCAM et le Laser CHEMCAM qui détermine la composition des roches à l'aide d'un laser, fournissent une première analyse chimique et géologique de l'environnement,
- deux instruments fonctionnant au contact de l'objet à analyser dont les senseurs sont situés au bout du bras du robot : le spectromètre à rayons X APXS et la caméra microscope MAHLI fournissent la composition chimique et des images détaillées facilitant la sélection des échantillons à analyser,
- deux laboratoires d'analyse logés dans le corps du rover et alimentés en échantillon de sol ou de roche martienne par la foreuse et la mini pelleteuse situés au bout du bras du rover : CheMin qui effectue l'analyse minéralogique et SAM qui effectue l'analyse des éléments organiques et volatils,
- quatre instruments caractérisant l'environnement martien : la station météorologique REMS, le détecteur de particules énergétiques RAD qui mesure les radiations qui parviennent jusqu'au sol, le détecteur de neutrons DAN chargé d'identifier la présence d'eau dans le proche sous-
sol et la caméra de l'étage de descente MARDI qui réalise avant l'atterrissage des photos de la zone environnante.
revenir à la page d’où je viens passer à l’exploration de Mars par Curiosity voir les films de MSL par Curiosity
Ça baigne, oui ? Alors, on continue !
 Les caractéristiques techniques de MSL
Les caractéristiques techniques de MSL
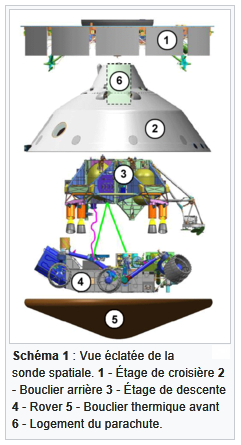
La sonde spatiale Mars Science Laboratory, comme les engins de sa catégorie qui l'ont précédée, se compose de quatre éléments principaux :
- l'étage de croisière qui assure le transit entre la Terre et Mars
- le véhicule de rentrée qui protège la sonde durant la rentrée atmosphérique et assure une première phase de freinage
- l'étage de descente qui accomplit la dernière phase de descente puis dépose en douceur le rover sur le sol martien,
- le rover Curiosity proprement dit chargé de mener à bien la mission sur le sol martien.
Le rover Curiosity
Le rover Curiosity est un engin particulièrement imposant avec une masse de 899 kg à comparer aux 174 kg pour les rovers Spirit et Opportunity, et à peine 10,6 kg pour Sojourner. Sa taille lui permet d'embarquer 75 kg d'instruments contre 6,8 kg pour les rovers MER. Le rover est long de 2,7 m. La partie centrale du rover montée sur roues, la « boîte électronique chaude » (warm electronics box ou WEB) renferme l'électronique et les deux instruments scientifiques qui doivent analyser les échantillons de sol et de roche. Un mât, qui est implanté sur l'avant de ce boîtier et qui culmine à 2,13 mètres, porte plusieurs caméras, des sondes atmosphériques, ainsi que le spectromètre laser. Le bras télécommandé est articulé à l'avant du rover et supporte à son extrémité les équipements de prélèvement d'échantillon ainsi que deux instruments scientifiques. L'arrière du boîtier est occupé par le générateur thermoélectrique à radioisotope que surplombent les antennes de télécommunications.
L'informatique embarquée (technique, mais des fois que t’aurais des connaissances là-
Le rover dispose de deux ordinateurs identiques « radiodurcis » pour résister aux rayons cosmiques. Ils utilisent tous deux un microprocesseur RAD750 fournissant une puissance de 400 MIPS à 200 MHz, successeur du RAD6000 utilisé par les Mars Exploration Rovers. Chaque ordinateur comporte 256 Ko d’EEPROM, 256 Mo de mémoire DRAM et 2 Go de mémoire flash. L'ordinateur de bord de Curiosity a une capacité dix fois supérieure à celle des rovers MER. Il pilote les activités du rover à la surface de Mars mais il joue également le rôle d'ordinateur de bord pour l'ensemble de la sonde durant toutes les phases allant du lancement jusqu'à l'arrivée sur le sol martien.
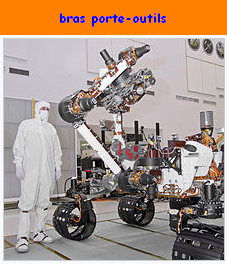 Le bras porte-
Le bras porte-
Comme les rovers MER, le rover MSL dispose d'un bras (Robot Arm RA) portant à son extrémité un ensemble d'outils utilisés pour analyser in situ des échantillons de sol et de roche ; le bras permet également de recueillir des échantillons qui sont analysés par les mini laboratoires SAM et CHEMIN.
La manipulation des échantillons du sol martien
Les échantillons du sol martien peuvent être recueillis à l'aide de la foreuse qui comporte un système de collecte de la roche broyée ; celui-
Télécommunications
Pour transmettre les données scientifiques recueillies, les données de navigation et les données télémétriques sur son fonctionnement ainsi que pour recevoir les instructions mises au point par l'équipe à Terre, le rover dispose de plusieurs antennes. Une antenne hélice quadrifilaire fonctionnant en bande UHF est utilisée pour les communications à courte portée avec les sondes en orbite autour de Mars.
La navigation sur le sol martien
Pour que le rover puisse se déplacer le rover et les équipes au sol utilisent les images fournies par plusieurs caméras. Quatre paires redondantes, dites Hazcam (Hazard Avoidance Cameras), sont montées deux par deux à l'avant et à l'arrière du corps du rover et sont utilisées pour détecter les obstacles qui se présentent sur la trajectoire du rover. Ces appareils dotés d'un objectif fisheye avec un champ optique de 124° fournissent des images en noir et blanc permettant de reconstituer une image tridimensionnelle de ce qui se situe devant et derrière le rover jusqu'à 3 mètres de distance et sur une largeur de 4 mètres. Pour protéger les objectifs de la poussière soulevée par l'atterrissage, ceux-
Deux autres paires de caméras (Navigation Cameras ou Navcams) montées au sommet du mât du rover de part et d'autre des caméras à usage scientifique MASTCAM, permettent d'obtenir des panoramiques en relief sur un champ de 45°. Elles sont utilisées avec les caméras Hazcam pour déterminer la configuration du terrain et planifier les déplacements du rover. Une centrale à inertie à trois axes doit faciliter la navigation sur le terrain.
Le rover peut se déplacer à une vitesse de 4 cm par seconde en navigation automatique sans détection d'obstacles soit 150 m/h, mais si la détection d'obstacle est activée sa vitesse chute à 2 cm par seconde soit 75 m/h en moyenne compte tenu des irrégularités du terrain ou des problèmes de visibilité. Le rover Curiosity est conçu pour parcourir au moins une vingtaine de kilomètres au cours des 22 mois terrestres que doit durer au minimum sa mission primaire.
 Le lancement
Le lancement
Le lanceur Delta II utilisé habituellement par la NASA pour le lancement de ses sondes interplanétaires n'a pu être retenu pour MSL compte tenu de sa masse et de son diamètre. La sonde doit être lancée par une fusée Atlas V 541 ; cette version du lanceur, de la classe de puissance de la fusée Ariane V, dispose d'une coiffe d'un diamètre de 5 mètres et peut placer une sonde de 4 tonnes sur une trajectoire interplanétaire.
La distance entre la Terre et Mars évolue constamment et cette dernière ne devient accessible que durant une période de quelques mois tous les deux ans. Par ailleurs, le lancement doit permettre à la sonde spatiale d'arriver à proximité de Mars dans des conditions très précises :
- le Soleil doit être levé sur le site d'atterrissage,
- les sondes Odyssey et MRO, en orbite autour de Mars, doivent pouvoir relayer les liaisons radio durant l'ensemble de la descente vers le sol martien,
- la zone de l'atterrissage doit être si possible couverte par les antennes de réception sur Terre sous un angle pas trop défavorable,
- la vitesse d'arrivée dans l'atmosphère martienne doit être inférieure ou égale à 5,9 km/s.
revenir à la page d’où je viens passer à l’exploration de Mars par Curiosity voir les films de MSL par Curiosity
L’atterrissage
L'atterrissage sur Mars se décompose en cinq phases :
- la phase d'approche,
- la rentrée atmosphérique pilotée qui fait tomber la vitesse à Mach 2 tout en corrigeant de manière active les écarts par rapport à la trajectoire idéale,
- la descente sous parachute lorsque la vitesse a chuté sous Mach 2,
- la descente propulsée à partir de 1500 mètres d'altitude grâce à des moteurs chargés d'annuler la vitesse résiduelle,
- la dépose par l'étage de descente fonctionnant à la manière d'un hélicoptère grue du rover sur le sol martien.
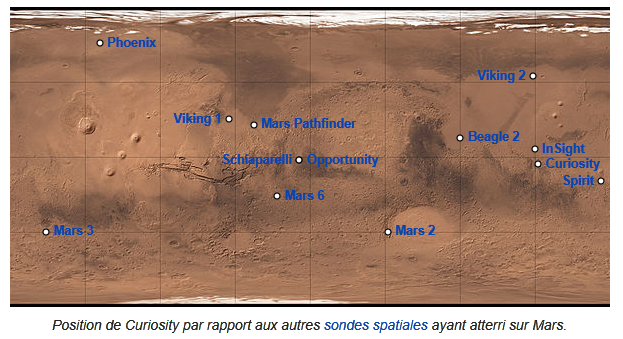
Position de Curiosity par rapport aux autres sondes spatiales ayant atterri sur Mars
 Caractéristiques du cratère Gale
Caractéristiques du cratère Gale
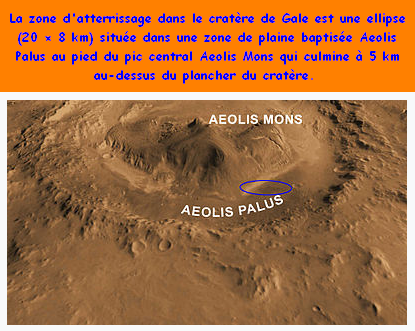
Le rover doit être déposé à l'intérieur du cratère Gale par 4,6° de latitude sud et 137,4° de longitude Est. Ce cratère de 154 km de diamètre comporte en son centre l'Aeolis Mons, un pic qui culmine à 5 kilomètres au-
Les strates visibles sur le mont central permettent de penser que celui-
revenir à la page d’où je viens passer à l’exploration de Mars par Curiosity voir les films de MSL par Curiosity